Die ASS Maschinenbau GmbH, Overath, präsentierte auf der K 2016 eine marktreife, prozesssichere und somit serientaugliche Lösung zum Thema „Griff in die Kiste“. Die Herausforderung liegt in der verlässlichen Reproduzierbarkeit […]

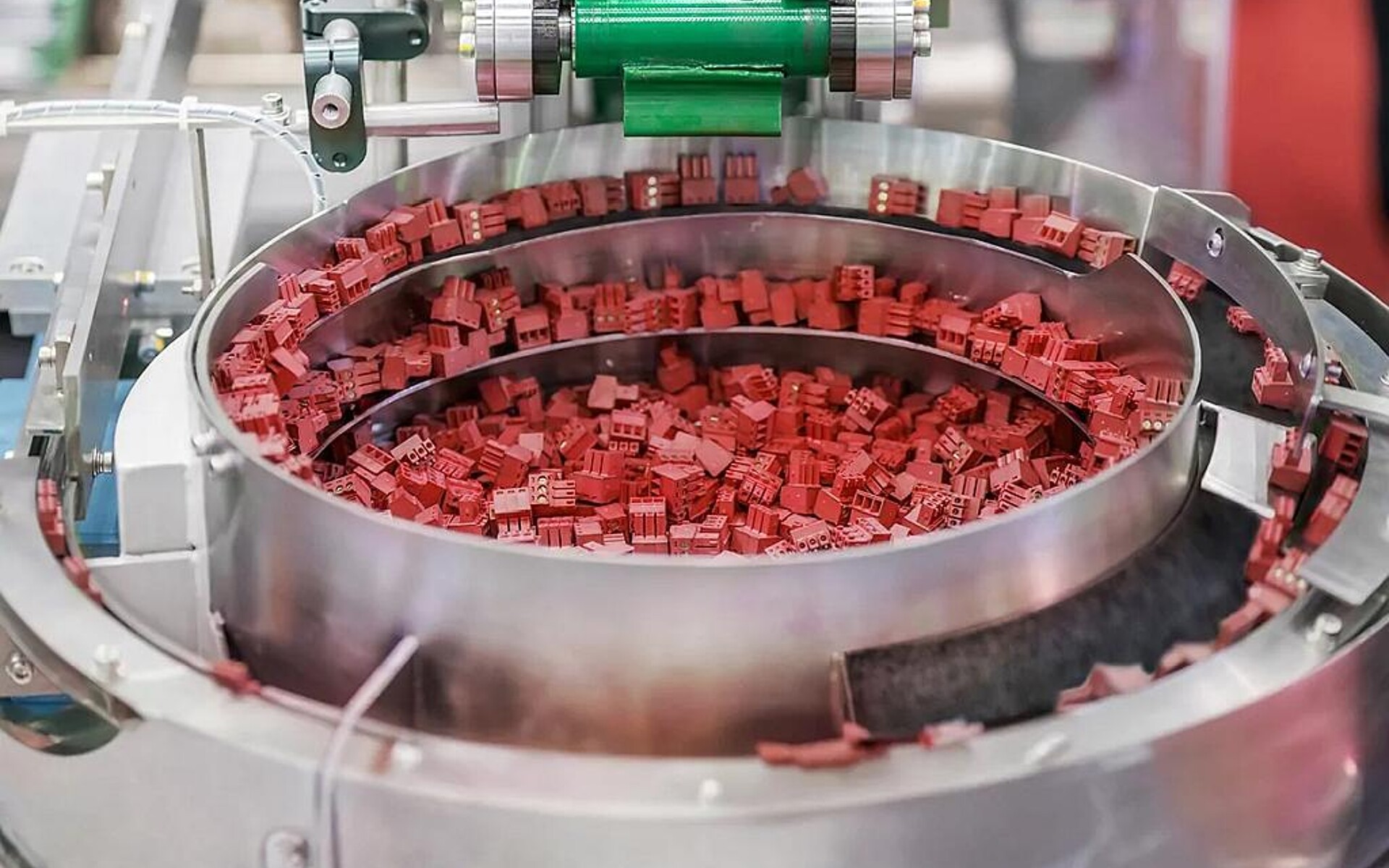
ASS entwickelte eine prozesssichere Lösung für den Griff in die Kiste unter Einsatz der Kameratechnik von Isra Vision und Roboter von Motoman. (Foto: ASS)
Die ASS Maschinenbau GmbH, Overath, präsentierte auf der K 2016 eine marktreife, prozesssichere und somit serientaugliche Lösung zum Thema „Griff in die Kiste“. Die Herausforderung liegt in der verlässlichen Reproduzierbarkeit der Entnahme von ungeordnetem, insbesondere klein dimensioniertem Schüttgut aus Transportbehältern. Als Spezialist für Systemintegration zeigte ASS eine Umsetzung anhand realer Kundenteile.
Hierzu eine prozesssichere Kameratechnik zu finden, war eine der größten Herausforderungen. Mit Isra Vision wurde ein Kooperationspartner gefunden, dessen Kameratechnik alle Anforderungen erfüllt und auch die verlässliche Handhabung von kleinen Bauteilen erlaubt. Mit dem Modell Isra Shapescan3D 400 HR und dem Roboter Motoman MH5LF von Yaskawa konnte auch diese Herausforderung erfolgreich gelöst werden.
Die Systemintegration und das Zusammenfassen von Technologien ist eine der Kernkompetenzen von ASS. So wurde auch für den „Griff in die Kiste“ alles von der Machbarkeitsanalyse über die Konzeption und Projektierung, bis hin zur Integration in die Fertigungsumgebung des Kunden durch ASS realisiert.
Die Automationsanlage kann in der weiteren Produktion größtenteils selbstständig vom Kunden angepasst werden. Die intuitive Bedieneroberfläche ermöglicht eine einfache Handhabung und individuelle Anpassung ohne besondere Programmierkenntnisse.
Das Messeexponat zeigte den Arbeitsablauf der Praxisumsetzung beim Kunden: Das Kamerasystem scannt die Werkstücke und deren Lage. Der Roboter fährt anschließend an die übermittelte Position und entnimmt das Werkstück. In der Praxis führt der Roboter das Bauteil einer Werkzeugmaschine zu. Im Messeexponat wird dieser Vorgang simuliert, indem der Roboter das Bauteil in eine nebenliegende Box ablegt.